Project Overview
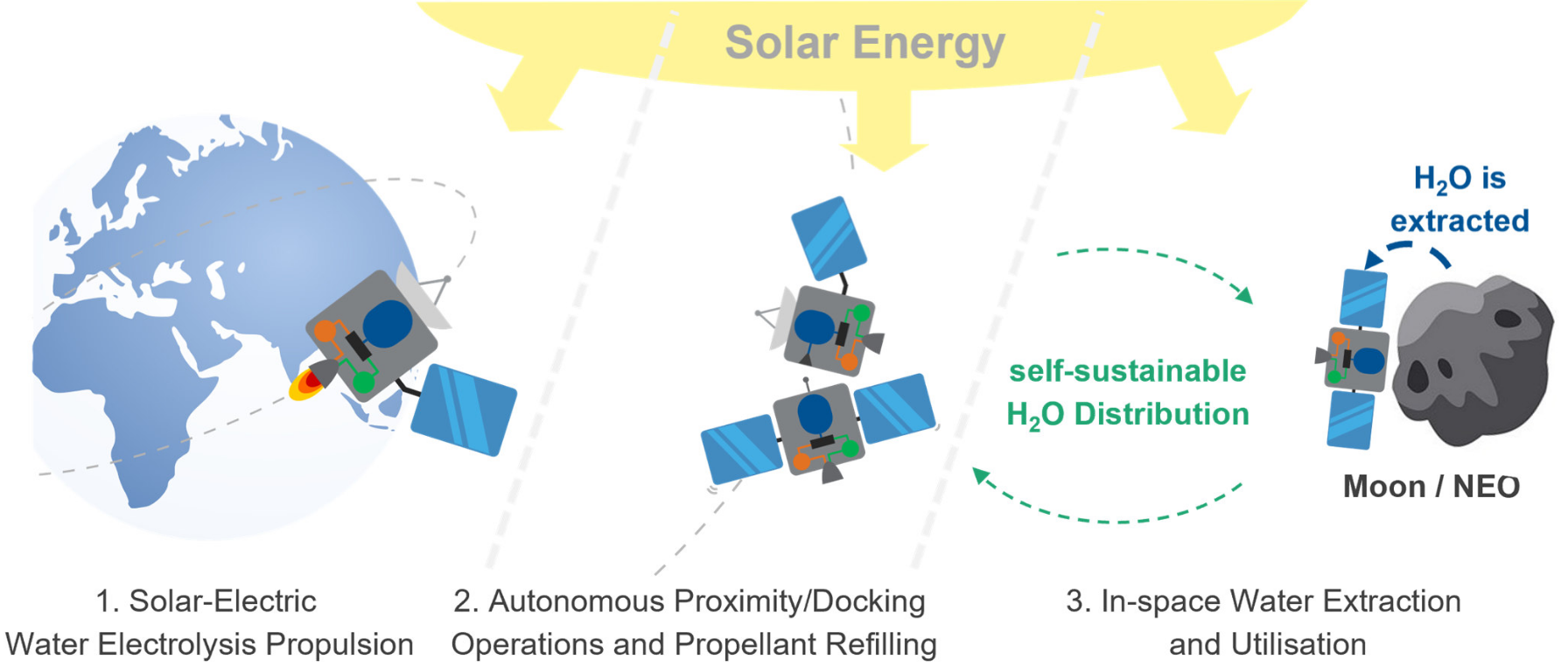
ICE2THRUST represents a groundbreaking approach to space propulsion, developing the world's first In-Situ Resource Utilisation (ISRU) end-to-end process chain that transforms ice into thrust. This innovative system utilizes water as a propellant, decomposed by an electrolyser into hydrogen and oxygen for subsequent use in a thruster.
As Lead Research Scientist for RL-based autonomous navigation systems, I'm responsible for developing the intelligent control algorithms that enable autonomous proximity operations, docking, and propellant refilling procedures.