About Me

Hello! I'm Matteo, currently a PhD Student at the University of Luxembourg.
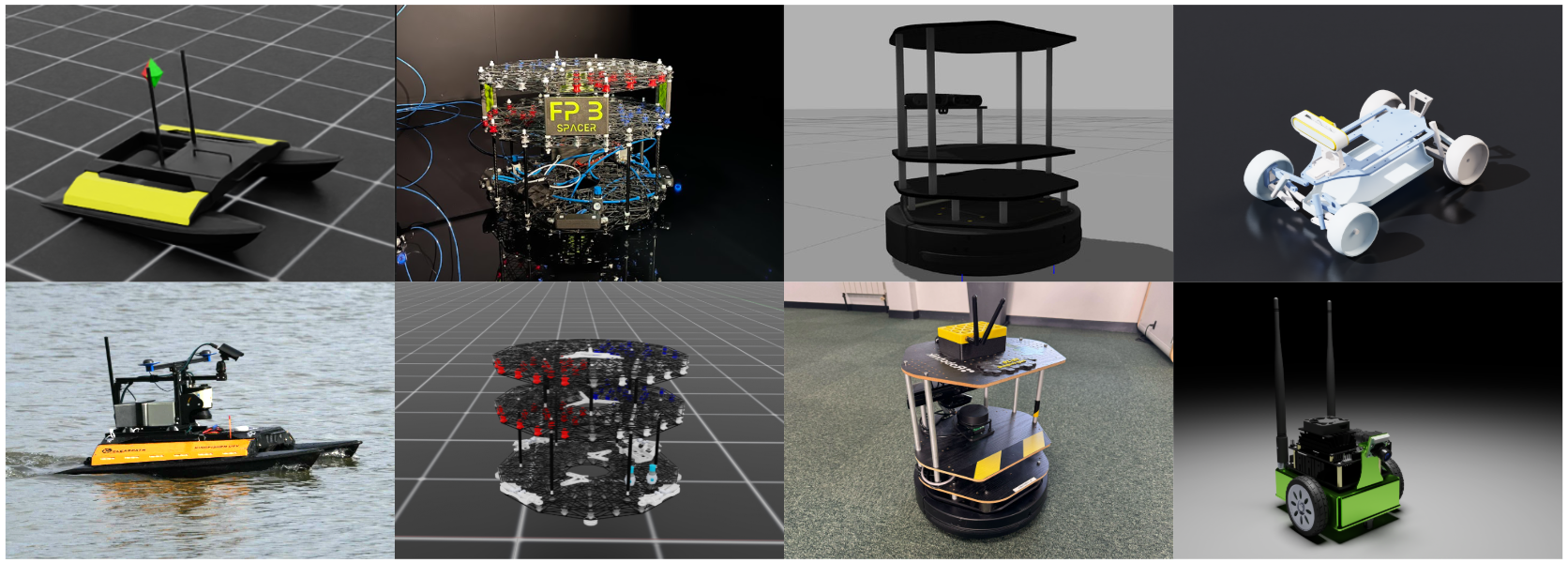
My research focus is on improving Reinforcement Learning (RL) algorithms in the context of autonomous complex robotic systems.
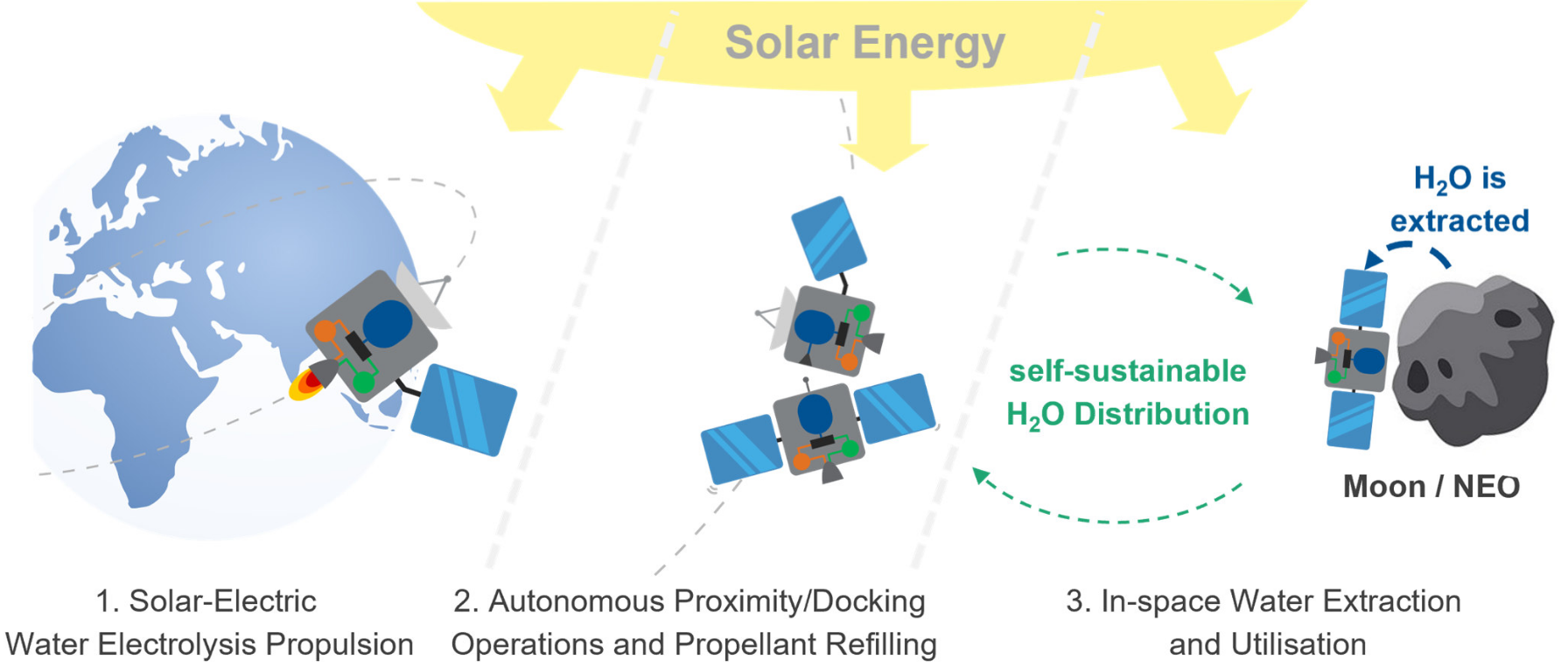
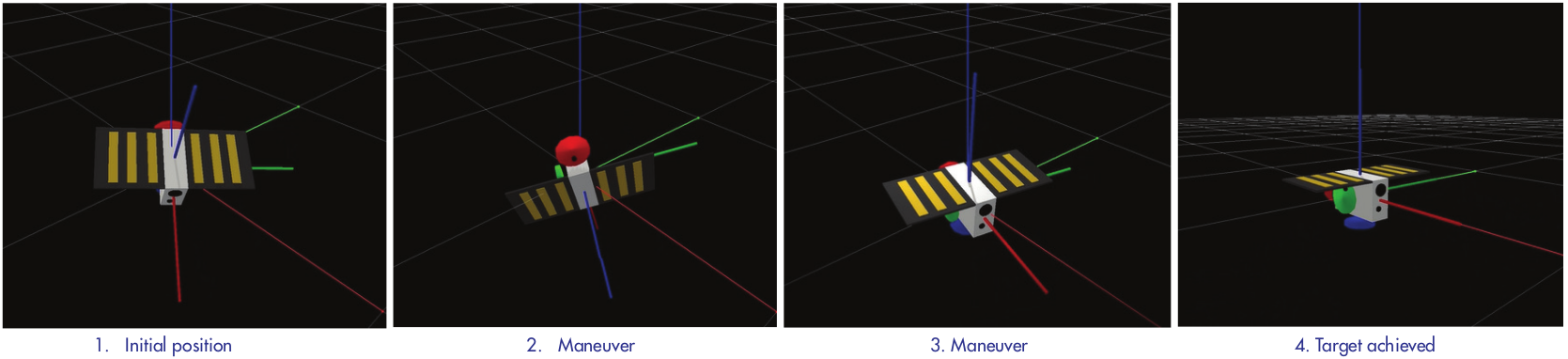
Previously, I worked for 3+ years as a Machine Learning Engineer at Argotec, an aerospace company specializing in micro-satellites for Deep Space. I contributed to the core algorithms used for the autonomous visual navigation of LICIACube and ArgoMoon, satellites that were part of NASA's DART and Artemis I Missions.
I have a Master’s in Computer Science and Engineering (AI track) from Politecnico di Milano and a double BS degree from PoliMi and Tongji University.
While building strong foundations in Machine Learning, complex systems dynamics, and related subjects through formal education, I like to pursue my interest in human behavior and psychology by reading about social dynamics, individual and collective intelligence. My drive is to build and understand AI technologies that can explore decision-making in ways novel to humans and potentially beneficial for tackling humanity's most pressing world problems.